
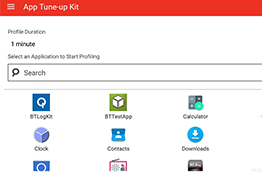
App Tune-up Kit工具的安装和操作
之前我们简单的介绍了此工具的一些特点,接下来将看一下如何安装和使用。首先要说一下App Tune-up Kit是直接安装到手机上的。
Qualcomm App Tune-up Kit时间:2017-08-25 10:51:13
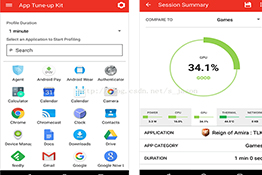
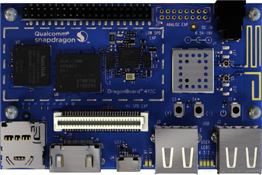
使用App Tune-up Kit工具分析Dragonboard410c
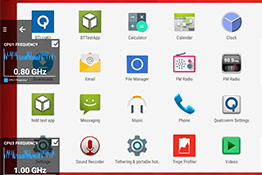
App Tune-up Kit是高通公司开发的一款通过创新的方式让开发人员在短短60秒内配置和分析任何Android应用程序的分析工具。 它界面简单,操作方便,只需要按一下,就能对CPU、GPU、Power、Thermal 和Mobile Data 5个方面的性能进行评估。
Qualcomm App Tune-up Kit Dragonboard410c时间:2017-08-18 10:12:44
使用Trepn Profiler工具分析Dragonboard410c的功耗和性能(一)
Trepn™ Profiler工具是高通开发的运行在使用高通骁龙芯片或者硬件开发设备等移动设备上分析功耗和性能的一个应用,可以帮助准确分析手机应用的性能和耗电情况。
Qualcomm Trepn Profiler Dragonboard410c时间:2017-08-17 11:48:13

基于Dragonboard 410c的智能照明系统(三)
前面已经介绍了智能照明系统的硬件准备,软件实现,接下来将简单介绍一下操作过程。
Dragonboard 410c 智能照明时间:2017-08-16 09:53:55

简单了解snapdragon的分析测试工具
现在产品的性能直接或间接的影响了用户的体验,所以性能的提升是个关键的问题,要想提升性能首先就要有一个比较,这时候你就需要测试和分析工具了,所以,了解一下snapdragon的几个分析测试工具是非常重要的。
Qualcomm,snapdragon Android intents 测试工具时间:2017-08-15 03:37:25

基于DragonBoard 410c的燃气烟雾检测器(五)
燃气烟雾检测器做完了,现在简单描述一下其工作原理和操作过程。用一个打火机来模拟气体泄漏, 这个装置是通过app控制的,一旦发生误触发误操作,我们在app端有一个停止按钮可以手动关闭警报装置。
Qualcomm DragonBoard 410c 烟雾检测器时间:2017-08-10 11:33:52

DragonBoard 410c开发过程中遇到的节点读写问题
基于DragonBoard 410c做了一个小东西,写了一个驱动程序,创建了几个文件节点,其中创建了pwm节点,但是hal层读写节点失败,打印读到的数据发现不正确,写报错。
Qualcomm DragonBoard 410c 节点读写问题时间:2017-08-09 11:36:25

DragonBoard 410c Android 7寸屏HDMI调试
本文描述了如何用DragonBoard 410c板做显示器和触摸控制使用。其中包括使用wm命令查看屏幕分辨率与HDMI输出。详细的操作方法见本文。
Qualcomm DragonBoard 410c HDMI调试时间:2017-08-08 15:32:38
基于DragonBoard 410c的音乐储钱罐(三)
音乐储钱罐的音频的输出接口是在DragonBoard410c板上的Analog Expansion ,它有两个speaker的引脚。下边和小编一起看看怎么配置成音乐储钱罐吧。
Qualcomm DragonBoard 410c 音乐储钱罐时间:2017-08-08 11:38:21

基于DragonBoard 410c的音乐储钱罐(二)
音乐储钱罐是利用红外传感器来判断硬币的投入的,可以直接利用android自带的音乐播放器,该播放器只要接收到相关的键值,就可以自动进行播放音乐和切换歌曲。下边一起来看看具体的操作方法吧。
Qualcomm DragonBoard 410c 音乐储钱罐时间:2017-08-07 18:43:15

使用wm命令修改DragonBoard410c Android的显示分辨率
wm是高通平台(MTK平台类似的命令为am)下对手机分辨率、像素密度、显示区域进行设置的命令。wm命令的参数很多,不同的参数有不同的作用,下边一起来看看对应的参数所代表的意思吧。
Qualcomm DragonBoard 410c wm时间:2017-08-04 11:09:16
Qualcomm 开发者专区是 Qualcomm 联合CSDN 共同打造的面向中国开发者的技术专区。致力于通过提供全球最新资讯和最多元的技术资源及支持,为开发者们打造全面一流的开发环境。本专区将以嵌入式、物联网、游戏开发、Qualcomm® 骁龙™处理器的软件优化等技术为核心,打造全面的开发者技术服务社区,为下一代高性能体验和设计带来更多的想法和灵感。
加入 Qualcomm 开发者专区


申请成为“Qualcomm荣誉技术大使”
“Qualcomm荣誉技术大使”是Qualcomm开发者社区对开发者用户技术能力与影响力的认证体现,该荣誉代表Qualcomm社区对用户贡献的认可与肯定。
立即申请
高通技术公司推出头戴式AR开发套件骁龙Spaces™ XR开发者平台,助力打造无缝融合现实世界和数字世界边界的沉浸式体验。
为开发者提供实现创意的工具,并将变革头戴式AR的可能性,现已面市!
Qualcomm 活动 更多
6月19日
线上