

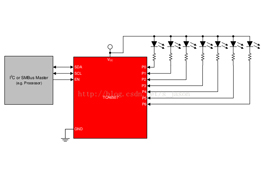
基于DragonBoard 410c的智能照明系统(二)
智能照明系统其主要部分就是aw2013这颗芯片的控制,通过它就可以随意的控制灯了,但是亮度上总感觉有点不够,不过后面我们可以慢慢完善,先来看看驱动代码吧。
Qualcomm DragonBoard 410c 智能照明系统时间:2017-08-02 10:03:16

基于DragonBoard 410c的智能遥控器(一)
随着物联网和智能家居概念的提出,越来越多的家用电器都可以通过网络来控制。本文主要介绍了用ragonBoard 410c的开发板做一个智能遥控器,下边一起来看看它的工作原理和操作步骤吧。
Qualcomm DragonBoard 410c 智能遥控器时间:2017-07-31 09:41:22
基于DragonBoard 410c的智能照明系统(一)
节能一直是个热门话题,随着智能家居概念的提出,使得节能的理念更充分的体现在家用产品上。现在打算用DragonBoard 410c做一个智能照明系统,主要用于不同场景的照明,既能达到照明的效果,又能达到节能的作用。
Qualcomm DragonBoard 410c 智能照明系统时间:2017-07-28 09:36:35

基于DragonBoard 410c的燃气烟雾检测器(四)
本文介绍了烟雾检测器的硬件连接部分中的红灯驱动版块,这个版块依赖于linux操作系统,主要功能是报警。本文主要介绍了实现这一功能具体的代码配置,那么准备开始吧。
Qualcomm DragonBoard 410c 烟雾检测器时间:2017-07-27 09:50:19

基于DragonBoard 410c的燃气烟雾检测器(三)
在烟雾监测器中,有多个硬件模块。而每个硬件模块部分都需要对其进行调试。下边我们一起来看看温湿度检测模块dht11的调试过程。请直接看程序吧。
Qualcomm DragonBoard 410c 烟雾检测器时间:2017-07-26 09:47:50

基于DragonBoard 410c的燃气烟雾检测器(二)
本文介绍了烟雾检测器的硬件连接部分,先说一下MQ-2这个模块,它有AO(模拟信号)输出和DO(TTL信号)输出,这里我是接的DO,接下来就是软件上如何去实现了,下面来看一下具体过程吧。
Qualcomm DragonBoard 410c 烟雾检测器时间:2017-07-26 09:43:42

DragonBoard410c Android源代码编译:ubuntu16.04 安装使用不同版本JDK
Ubuntu16.04的安装源已经默认没有openjdk7了,所以要自己手动添加仓库。包括安装openjdk;安装oracle jdk;切换jdk版本。具体的实践程序操作方法,请参考本文。
DragonBoard410c Android Ubuntu16.04时间:2017-07-21 10:36:02

基于DragonBoard 410c的燃气烟雾检测器(一)
本文主要介绍了用410c做一个简单的燃气烟雾检测器中使用工具的操作方法。具体有燃气烟雾检测模块MQ-2;温湿度传感器dht11;同时用数据时序图的方式,讲解了dht11的工作原理。
Qualcomm,DragonBoard 410c 烟雾检测器时间:2017-07-20 09:40:23

基于DragonBoard 410c的mic和speaker的loopback调试
本文为大家带来了用DragonBoard 410c实现相互通话的方法,需要配置的接口mic和speaker,HDMI。以及相应的文件程序执行方法,测试程序,执行相关程序命令等。
Qualcomm DragonBoard 410c loopback调试时间:2017-07-18 10:10:34

DragonBoard410c Android USB Camera 使用:mjpg-streamer 移植到Android平台(三)
本文具体提介绍有关于用 DragonBoard410c Android USB使用Camera的实践代码中关于:如何把mjpg-streamer和jpeg库代码下载下来后放入external目录的部分。
Qualcomm DragonBoard 410c mjpg-streamer时间:2017-07-14 12:07:05
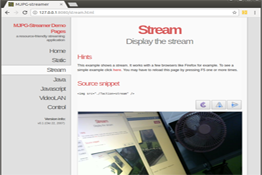
DragonBoard410c Android USB Camera 使用:mjpg-streamer 在ubuntu16.04安装与使用(二)
mjpg-streamer是基于jpeg库来处理摄像头数据的,因此在移植使用mjpg-streamer之前必须先安装或移植jpeg库,本期Blog将给大家介绍mjpg-streamer 在ubuntu16.04安装与使用。
Qualcomm DragonBoard 410c mjpg-streamer时间:2017-07-13 10:04:36
Qualcomm 开发者专区是 Qualcomm 联合CSDN 共同打造的面向中国开发者的技术专区。致力于通过提供全球最新资讯和最多元的技术资源及支持,为开发者们打造全面一流的开发环境。本专区将以嵌入式、物联网、游戏开发、Qualcomm® 骁龙™处理器的软件优化等技术为核心,打造全面的开发者技术服务社区,为下一代高性能体验和设计带来更多的想法和灵感。
加入 Qualcomm 开发者专区


申请成为“Qualcomm荣誉技术大使”
“Qualcomm荣誉技术大使”是Qualcomm开发者社区对开发者用户技术能力与影响力的认证体现,该荣誉代表Qualcomm社区对用户贡献的认可与肯定。
立即申请
高通技术公司推出头戴式AR开发套件骁龙Spaces™ XR开发者平台,助力打造无缝融合现实世界和数字世界边界的沉浸式体验。
为开发者提供实现创意的工具,并将变革头戴式AR的可能性,现已面市!
Qualcomm 活动 更多
6月19日
线上